Visual-Acoustic Vehicle Dataset
On the Development of an Acoustic-Driven Method to Improve Driver's Comfort Based on Deep Reinforcement Learning
Access our publication: Link
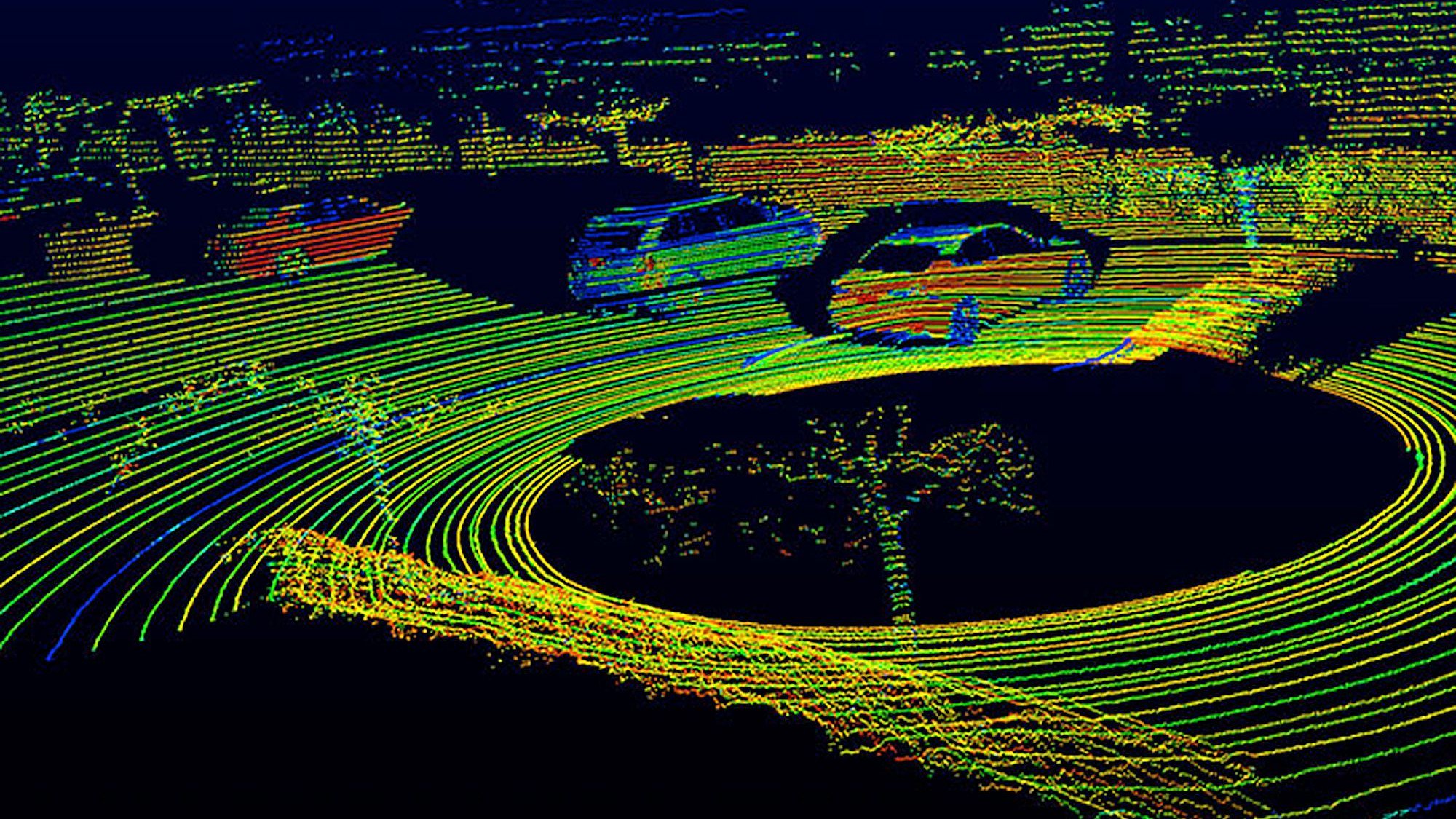
The Visual-Acoustic Vehicle Dataset is a set of multimodal data collected from a Lincoln MKS car including vehicle sensors information, 360º image data collected from eight cameras on top of the car, and LiDAR information. All the data has timestamps for syncronization purposes and is divided in four experiments.

Vehicle data
Tables containing car info topics as steering wheel angle, brake pedal status, tire pressure for each wheel, and IMU. (See all topics and sampling rates here)